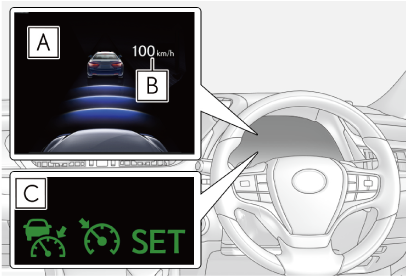
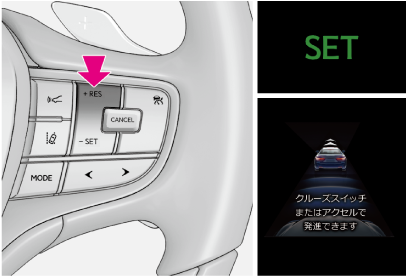
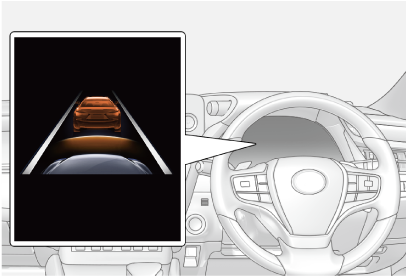
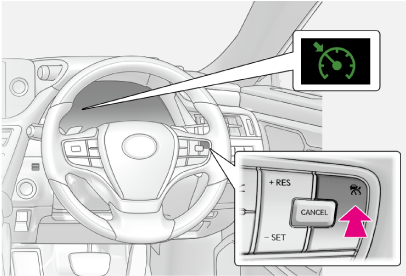
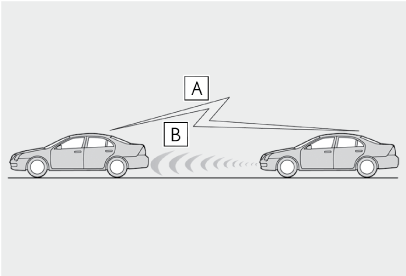
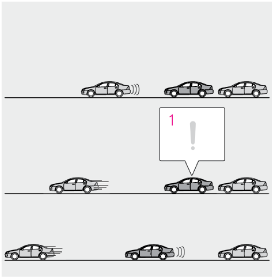
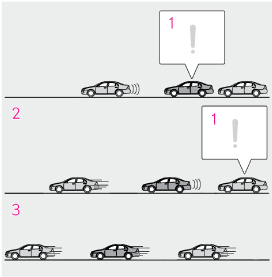
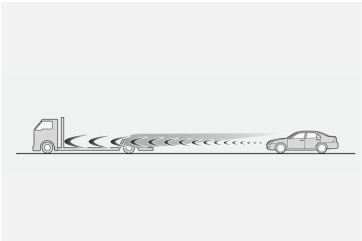
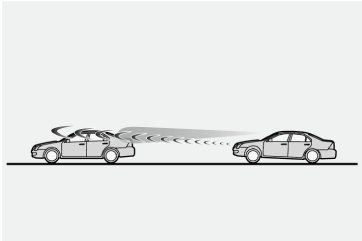
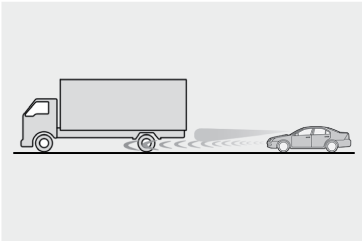
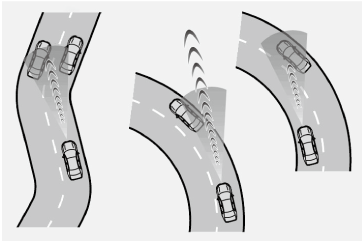
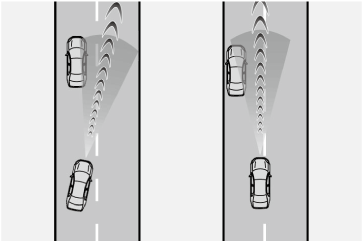
アクセルペダルを踏まなくても、車間制御モードでは、先行車の車速変化に合わせた追従走行を行い、自動的に加速・減速・停止をします。定速制御モードでは、一定の車速で走行できます。
通信利用型レーダークルーズコントロールはITS Connectを装備している車両のみ使用できます。
高速道路や自動車専用道路で使用してください。
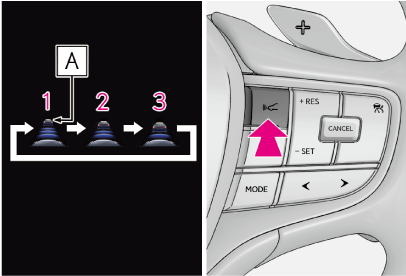
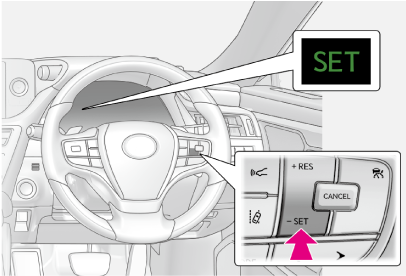
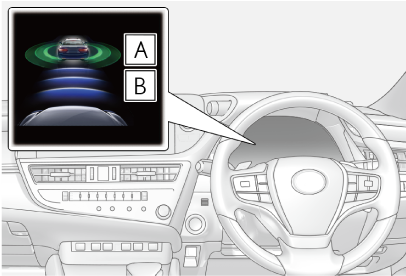
車間制御モード(→車間制御モードでの走行)
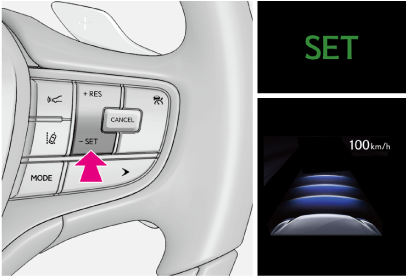
定速制御モード(→定速制御モードでの走行)
通信利用型レーダークルーズコントロール(ITS Connect装着車)(→通信利用型レーダークルーズコントロール(ITS Connect 装着車))